1. Introduction
Our team consists of four members: Joos, Lander, Maite and Wout. We are students from the Stedelijke Humaniora Dilsen. Joos is 17 years old while Lander, Maite and Wout are 16. We all study Science-Mathematics with 6 or 8 hours of Maths.
Our main goal in Cansat is to collect data, but also to land our capsule using a drone-like system. We are doing this to primarily get experience in this field of work. Secondly we will be trying to explore new manners of transporting goods over short distances.
2. Project description
2.1. Mission overview
The primary mission is to gather data such as the atmospheric pressure, temperature and humidity and send these to the ground station. We will be using Raspberry Pi’s, a BMP280 and an RFM69HCW radio.
The goal of our secondary mission is to let our capsule land safely. To achieve this, we are repurposing a small drone. One reason why we chose this mission is because we are trying to discover new manners of transporting goods. If for example you need to deliver medical supplies to a patient and he is high up on a mountain it could take more than an hour for a medic to arrive at the scene which can be fatal for the patient. If, on the other hand you use a drone which can deliver the medication to the patient precisely, it could save his life. This is just one example of many life saving opportunities this drone can attribute to.
2.2 Mechanical design
For our CanSat, we don’t need to use a parachute, because we are landing with propellers. However, for safety, we are inserting a parachute that will deploy in case of a failure. Our mechanical design consists of a shell, and four arms that will open when the CanSat is descending. The four arms will be printed in place, simplifying the design and assembly. There will also be very little supports, which reduces the waste.
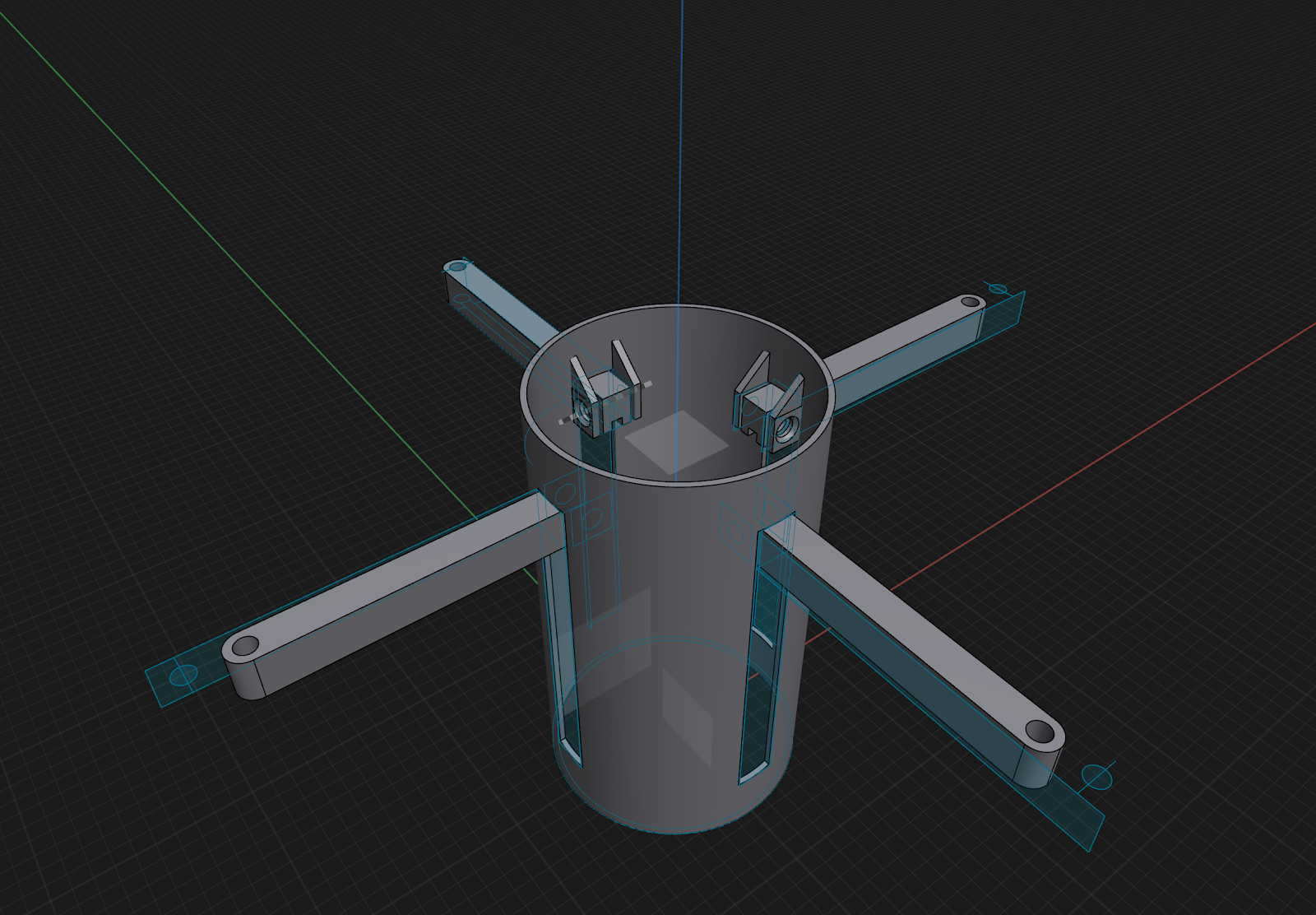
Figure 1: 3D-design, showing the four arms
2.3. Electronic design
As the main brain for our CanSat, we are using a Raspberry Pi Pico, simply because it was provided to us, and it is pretty reliable. To measure the data for the primary mission we are using a BMP280. After that, the data is sent to the ground station via an RFM69HCW radio. In our Cansat there will be a drone so we can properly land.
2.4. Ground station design
Our ground station has the same microcontroller, a Raspberry Pi Pico, and the same radio, an RFM69HCW. To connect it all we are using a breadboard, to keep it as simple as possible. The data will be sent from the Pico to the computer and the computer will save it on a hard drive. For our antenna, we can use the same antenna we used for Asgard, a competition where we launched a weather balloon.
2.5. Software design
We tried to keep our program as simple as possible, to rule out possible computational bottlenecks. The figure below displays our code in a simplified way.
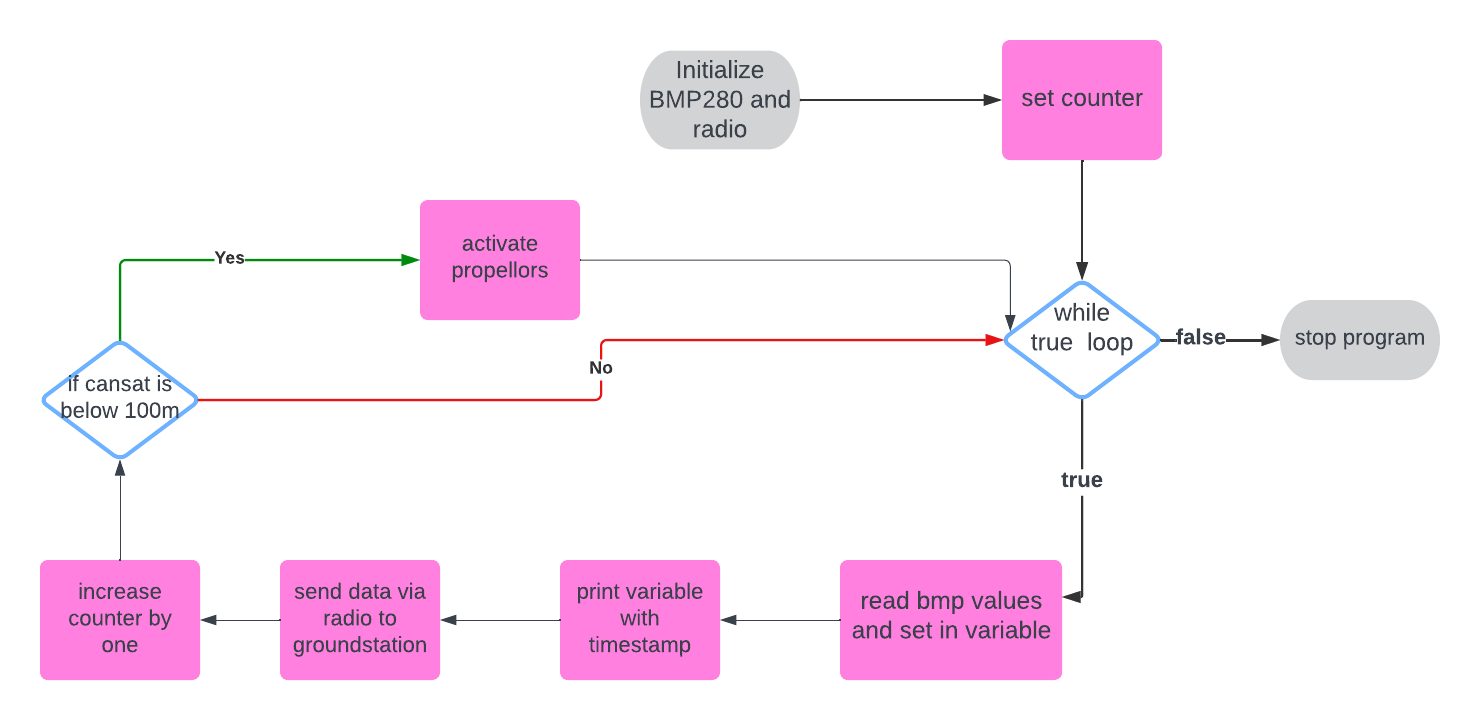
Figure 2: software flow chart
2.6. Recovery system
We have several ideas for this. For instance for good visibility we will print the can in fluorescent pink. When the module has landed, it will also play a loud beep. For extra security, in case the drone lands too far from the launch site, we will put a small paper in it with our contact information.
2.7. Testing
We have tested the primary mission, except for the long distance transmitting.
3. Requirements
Our module will meet the maximum allowed dimensions and weight. In our design we have made sure that the module will have an easily accessible powerswitch. Our design will also make sure that the module will be strong enough to withstand the high g forces. With our landing system we can be fairly precise in how much time it takes for our drone to land. With this system the time window should also be no problem.
4. Overall progress
4.1. Human resources
Our team consists of Joos, Lander, Maite and Wout. Maite is responsible for the management, presentation, following up of deadlines and informing the local community via our social media. Joos will be busy with the software of the primary mission, the design of the module and the wiring. Wout and Lander are writing the software for the secondary mission and Lander will build an amplifier for the drone.
5. Conclusion
Unfortunately our team did not qualify for the finals and we needed to cancel our project. We learned a lot from this project and we would like to try again next year.